
Intelligence Value
The WRIVA program aims to develop software systems to perform site modeling in scenarios where a limited volume of ground-level imagery with reliable metadata is available.
Summary
Site models are highly desired to allow personnel to train and rehearse prior to executing a mission, but typically require a large volume of carefully collected data. Many agencies in the U.S. Intelligence Community, Department of Defense, or law enforcement require this capability to enhance safety while conducting activities where a rich corpus of imagery is unavailable to prepare operations, such as humanitarian and disaster relief (HADR). Expanding site modelling capabilities would allow these activities to be conducted more effectively, with reduced risk to personnel.
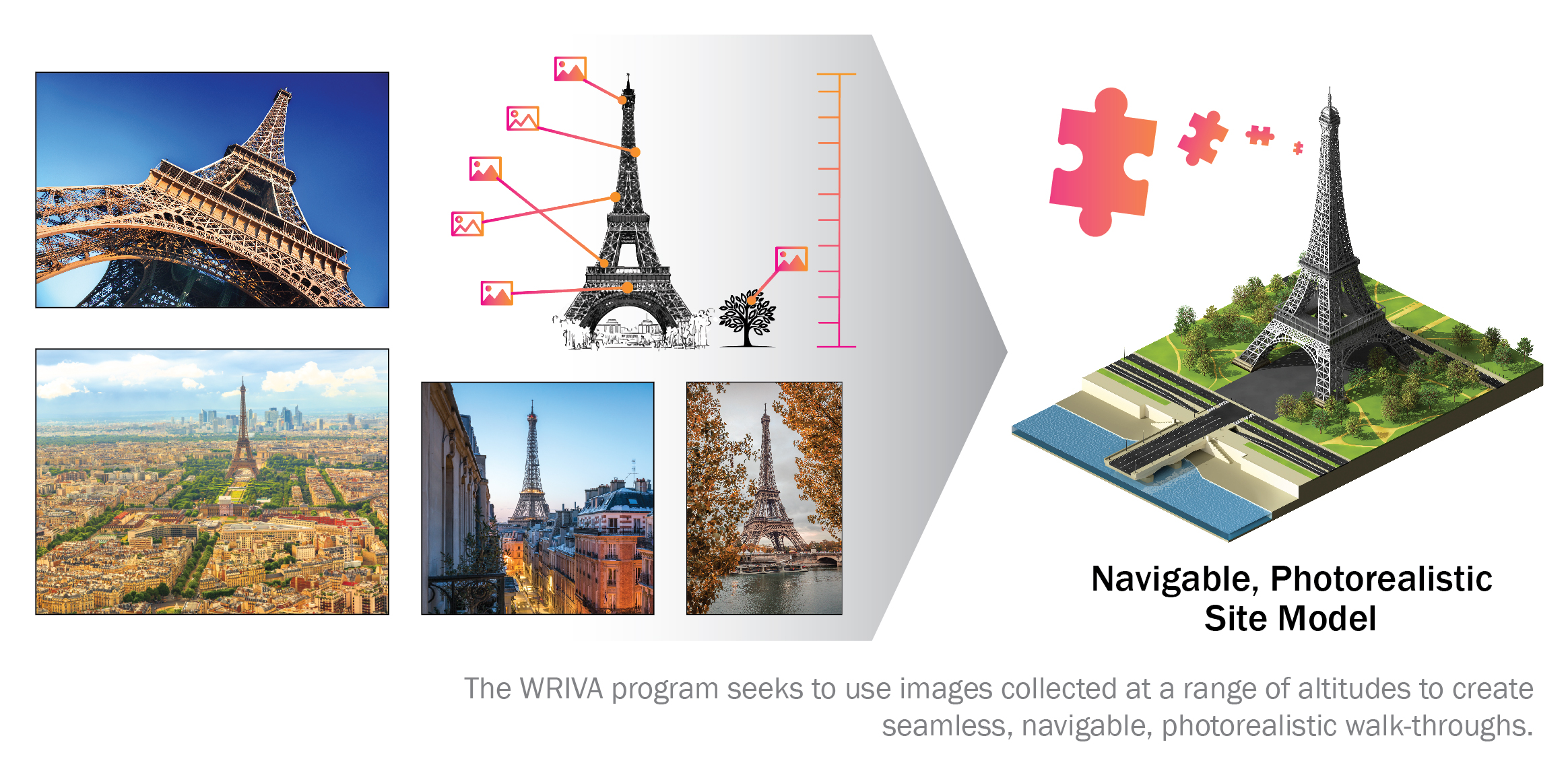
WRIVA’s goal is to develop software systems that can create photorealistic, navigable 3D site models using a highly limited corpus of imagery, to include ground level imagery, surveillance height imagery (traffic camera), unmanned aerial vehicle altitude imagery, and satellite imagery. Additionally, where imagery lacks metadata indicating geolocation, information about camera parameters, or is corrupted by artifacts, WRIVA seeks to detect and correct these factors to incorporate the imagery in site-modelling and other downstream image processing and analysis algorithms.
The WRIVA program kicked-off in 2023 and will be a 42-month effort.
Example of 3D reconstruction and rendering across varying altitudes. The reconstruction uses about 2,000 images on the Johns Hopkins University Applied Physics Laboratory campus; most of them are ground images, and less than 200 are drone images.
